Originally, the cabinets had electro mechanical switches and a rotary drum. They worked by having the rum rotate, and cams would engage and disengage mechanical points that would lead to circuits running the greens, yellows, and reds. Many agencies still use these types of controller assemblies. If you are standing next to a controller cabinet, and you hear it whirring, and when the lights change, you hear a clunk sound from the box, the controller may well be one of these old electro mechanical systems.
In the early 1960's, the first electronic controllers started being fielded. Everyone seemed to be doing their own thing without respect to a standard. Control equipment was produced by Singer (the same Singer as sewing machines), and at times, major companies like IBM, Raytheon and others were trying to figure out how to make better machines.
In the 1970's, two basic standards were developed. The California Department of Transportation developed a stander with a bunch of other states, and produced the Traffic Engineering Electrical Specification (TEES). About the same time, the National Electric Manufacturers Association (NEMA) produced the TS-1 specification. In the 1980's, NEMA published the TS-2 specification. Each of these specifications has matured over time, with new, updated specifications for the equipment.
In the late 1990's, several different organizations updated a standard specification for electronic communications and controller operation that is known as the National Transportation Communications Infrastructure Protocol (NTCIP). This is supposed to provide a national standard for how all of the parts and pieces within a traffic signal and ITS system.
NEMA TS-1
NEMA TS-1 is one of the older forms of control environments. Essentially, everything is communicating via a series of large wire harnesses within the cabinet. The controller has multiple milspec cannon plugs on the front and it talks with the equipment via a dedicated pinout / wire combination to the specific equipment. This is a reliable form of signal system, with some caveats. First is that the controller tells the equipment what to do, but never gets a check back from the equipment. This means that the signal controller assumes that the signal is doing what it has been told to do. There is a conflict monitor that makes sure that the signal does not malfunction.

Another issue with this type of controller is that while there are three of the cannon plugs defined by the NEMA TS-1 standard, any additional connectors are not defined. This is important, since the fourth connector plug includes how extra detection inputs are mapped, how the emergency vehicle preemption inputs are mapped, and other factors.
The basic NEMA TS-1 spec has 16 defined detection inputs. Depending on the generation of the equipment, there may only be between two and twelve phases available, and as few as 8 detection inputs. Some of the more modern NEMA TS-1 controllers can handle up to 64 detection inputs, but only 24 are really available.
The reason why this is important, is that if a cabinet is configured for one particular brand of controller, and the engineer wants to change the controller to a different brand of controller, some care needs to be given as to how the controller cabinet needs to be rewired to accommodate the new controller's inputs and outputs. This is especially true if the controller's manufacturer has a really unique hardwire mapping in the controller. For example, the Traconex CJ-32 controller is a modified NEMA TS-1 controller that has 32 unique detection inputs, however, 16 of these detection inputs are remapped to the phase hold and phase omit input pins. As long as you trade one Traconex CJ-32 for another CJ-32, it is ok, but change out the CJ-32 for a straight CJ, or and Econolite ASC/2, then you have your detection inputs causing the signal to omit and hold vehicle movements. That may not be what you are intending.
There are modern NTCIP controllers that are configured to fit in a NEMA TS-1 cabinet environment, and allow the pin inputs to be reassigned by the programming.
NEMA TS-2
NEMA TS-2 cabinets essentially refer to a controller that has a serial communications system referred to as "SDLC". This is a fancy term for a RS-485 communications system that connects the controller, Malfunction Management Unit (a fancy conflict monitor), the detection inputs, and the load bay.
The SDLC communications allow all of the equipment to talk back and forth, ten times per second, to send an command, and get a response that the command was executed.
The back and forth communications allow the controller to make sure that the signal is working properly. The downside is that once in a while the SDLC communications skips a beat or two. Depending on what type of communications parameter was skipped by the communications system, this can either be logged, or actually send the signal into flash.
The Malfunction Management Unit for the NEMA TS-2 environment also monitors pedestrian WALK / Flashing DONT WALK, which the Conflict Monitor for the NEMA TS-1 environment does not.
The NEMA TS2 cabinet is usually capable of 64 unique detection inputs. The specification allows for up to 128, but I do not know of any manufacturer who has allowed for all 128 yet. 64 may sound like a lot of detection inputs, but when you start mixing and matching video, radar and loop inputs, you can eat up 64 detection inputs really fast.
One of the primary considerations that the traffic engineer needs to understand with the NEMA TS2-1 is that the detection comes in groups of 16 on a Bus Interface Unit (BIU). This means that if you are going to need 17 detection inputs for a TS2 video detection system, you need to reserve all 32 detection inputs on 2 BIU's, which reduces the number of loop channels available. Alternately, the engineer could use a TS1 video detection card, and then each camera would have 4 unique detection inputs.
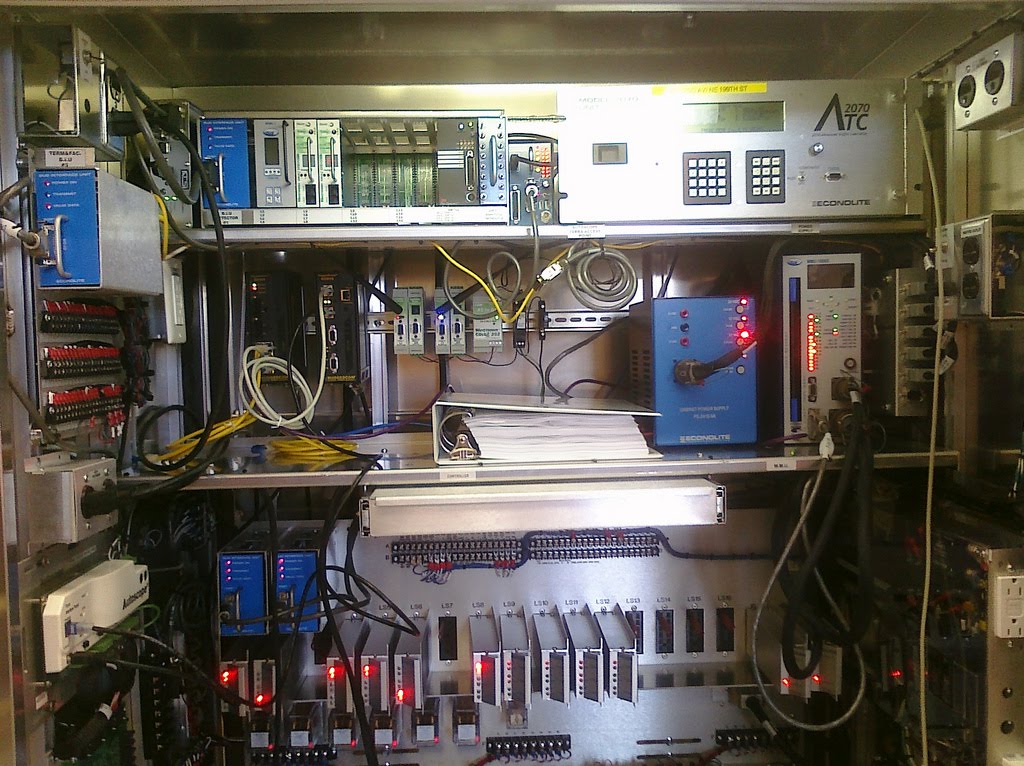
In the picture above, the controller is a 2070 controller, configured to operate in a NEMA TS2-1 environment.
One of the primary advantages of the NEMA TS-2 cabinet is that the internal communications are pretty standard. This allows for a very easy swap out of one brand / make / model of a controller for another. There should be very limited wiring differences between manufacturers. One of the few that may need to be addressed is if the signal is operating with FSK communications, the connector for the inter-cabinet communication may need to be modified. Where with the TS-1 cabinet, there are approximately 65 wires that have to be modified on the D connector, and if the controller uses another connector, maybe another 35 or so on the fifth connector.
Since the TS-2 cabinet talks via the serial RS-485 communications bus, it is very easy to swap out equipment.
Hybrid NEMA TS2-2
There is a hybrid NEMA TS2 cabinet where the load bay runs off cannon plugs and the detection inputs run off the SDLC communications. This can be handy if you have an older cabinet, and just want to add a video detection system without messing around with the cabinet wiring.
Some agencies also use this type of configuration because they want hardwired outputs from the controller but want the flexibility of the SDLC detection.
332 (CalTrans TEES)
The CalTrans TEES cabinet is a family of cabinets that are sometimes erroneously referred to as "332" cabinets. A 332 cabinet is one of the CalTrans style of cabinets. There are a bunch of different types of cabinets, within the family.
The following photo is a modified 332 cabinet.

This type of standard wiring can be modified, and has in some cases, to allow each detection channel on the input files to have a unique detection channel on the controller. This can allow 46 unique vehicle detection channels, 4 emergency vehicle preemption channels, 4 pedestrian isolator switches and 2 channels of railroad preemption just by reassigning the wires on the existing C1 plug, assigning new inputs to the C11 plug, removing the bridging of the detection channels, and using a 2070 controller with an NTCIP style controller..
The advantage to the 332 style cabinet is that they are simple, robust, and cheap. They are essentially clones. The engineer is held by the rigid control of the 19 inch rack mount structure, and the limited choices that system holds. If anyone wants to arguer, please try putting a fiber distribution unit, a couple of fiber switches, a video detection system, a video encoder and some DIN rail mounted radar units into a standard single wide cabinet. It gets really tight.
The CalTrans Tees type of cabinets can be configures as a double wide cabinet, which does provide a very nice solution for having the traffic signal equipment on one side, and the Intelligent Transportation Systems gear on the other.
Blah, blah, blah. What does that mean? Essentially, the 332 style of cabinet can be a very powerful device.
There are some unique aspects to running a 332 cabinet that the engineer and tech need to know about.
- The cabinet will run normally with the monitor removed and the door open. The NEMA TS-1 and NEMA TS-2 cabinets should drop to all-red flash if the monitor is removed. This can be a problem on the 332 style cabinets, if you remove the monitor, and don't secure the door open. If the door is unsecured with the monitor out, and opens and shuts, the drivers will see the signal go from normal operation to all-red flash, back to normal operation and flash every time the door closes and opens.
- Putting the cabinet into all-red flash does not apply stop time to the controller. This means that if the cabinet is put into flash, then out of flash, the controller has continued to cycle away. If the cabinet is put into all-red flash, then taken out a few seconds later, the signal may have very different indications lit than what was operating when it went into flash.
- Many 332 style cabinets to not have a hardwired stop time switch. Some controllers have the ability to assign the AUX switch on the front of the controller as a stop time switch.
- The cabinet may be wired with a detection display panel. Many agencies have the display panel configured such that there are a bunch of detection switches, and if the switch is broken, or is not flipped to the correct position, the detection amplifier will place calls, but the switch will prevent the call from going into the controller.
- If you have the cabinet set to normal operation (not switched into all-red flash), and you turn off the controller power, or remove the controller, all of the signal indications will go dark. To remedy this, manually set the cabinet into into FLASH and it should begin all-red flash.
